Operating System Concepts - Unit 2 Solved
NOTE
Algorithm and numericals will be handled in a seperate section, and will be uploaded. Click here to view.
Q1. Give an overview on User and Kernel Threads
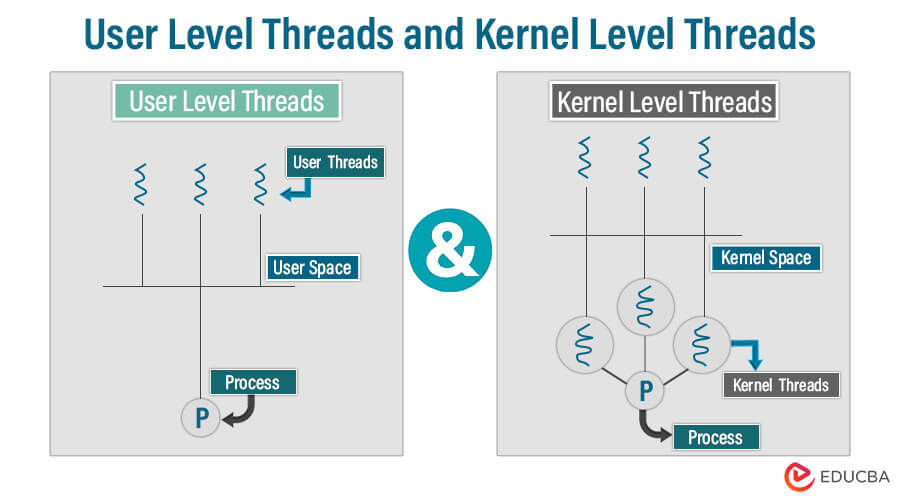
Multithreading in concurrent programming involves two primary types:
- user-level threads
- kernel-level threads
User-level threads are managed by thread libraries in user space, while kernel-level threads are managed directly by the operating system kernel
| Aspect | User-Level Threads (ULTs) | Kernel-Level Threads (KLTs) |
|---|---|---|
| Management | Managed by user-level thread libraries | Managed by the operating system kernel |
| Context Switching | Lightweight and fast | Involves higher overhead |
| Parallelism | May not fully exploit multicore CPUs | Efficiently utilizes multicore processors |
| Synchronization | May lack robust kernel-level support | Strong support for synchronization mechanisms |
| Resource Management | Limited control over system resources | Direct access to system resources |
| Portability | More portable across different OS | Platform-dependent, less portable |
| Blocking Operations | May cause blocking of the entire process | Efficient handling of blocking operations |
| Visibility to OS | Independent of kernel, limited visibility | Directly interacts with the kernel, full visibility |
| Priority Scheduling | Limited control over scheduling policies | Priority-based scheduling by the kernel |
| Development Complexity | Simplified, suitable for lightweight apps | Requires a deeper understanding of system concepts |
| Scalability | May face scalability challenges | Better scalability with proper kernel support |
| Hardware Access | Limited access to low-level operations | Direct access to hardware resources |
| Creation Overhead | Lower creation overhead | Higher creation overhead (system calls involved) |
| Responsiveness | More responsive due to user-space thread switches | Less responsive due to kernel interaction for management |
| Fault Tolerance | A bug/crash in one ULT can affect all threads in process | More isolated; crash in one thread less likely to affect others |
Q2. Explain multitasking, multithreading and multithreading module
Multitasking
Multitasking in operating systems allows multiple tasks to run in an concurrent (or interleaved) manner, enhancing system performance.
- Multiprogramming ensures that the CPU (a very fast device) is used by other processes when one process becomes busy with IO (very slow compared to CPU).
- Multitasking further enhances multiprogramming by allocating fixed slot to each process ready to execute. It mainly runs processes in round robin manner.
Multithreading
Multithreading allows a program to execute multiple tasks concurrently within a single process.
- These tasks, called threads, share the same memory space and resources, leading to improved performance and responsiveness.
- There are three main multithreading models:
many-to-one,one-to-one, andmany-to-many.
Multithreading Models:
- Many-to-One:
- Multiple user-level threads are mapped to a single kernel thread.
- This model is efficient for thread management within a process, but it limits true parallelism, as only one thread can run on the CPU at a time.
- Blocking one thread blocks the entire process.
- One-to-One:
- Each user-level thread is mapped to a separate kernel thread.
- This model provides true parallelism and allows for better utilization of multi-core processors.
- However, it can be resource intensive due to the overhead of creating and managing multiple kernel threads.
- Many-to-Many:
- This model combines the advantages of the previous two.
- Multiple user threads are mapped to a smaller or equal number of kernel threads.
- This allows for concurrency and parallelism while minimizing overhead.
Single Core Implementation
- Multitasking Implementation:
- The operating system (OS) schedules which task runs at a given time through time-slicing.
- This involves rapidly switching between different processes or tasks, allocating a small time slice to each in a round-robin fashion
- This creates the illusion of simultaneous execution, allowing multiple applications to appear to run concurrently
- Multithreading Implementation:
- Multithreading on a single-core processor can simulate multitasking
- The CPU switches execution resources between different threads within a single process, enabling concurrent execution
- While only one thread is actively using the core, rapid switching between threads gives the appearance that multiple threads are running simultaneously
- This becomes even easier with Simultaneous Multithreading Implementations(SMT), like Intel's Hyper-Threading, where a single core can execute multiple threads concurrently by sharing resources, although only one thread's instructions are executed at a given moment.
Multi Core Implementation
- Multitasking Implementation:
- Multi-core operating systems can truly execute multiple tasks concurrently, as different CPU cores can work independently on different tasks
- For example, on a dual-core system, two different applications can access separate processor cores simultaneously, leading to improved overall performance
- The OS distributes different applications (processes) across the available CPU cores
- Multithreading Implementation:
- In a multi-core system, each thread within a multithreaded application can run concurrently on a separate processor core, achieving true simultaneous execution (parallelism)
- This allows for a significant performance boost for CPU-bound operations
Q3. What are the benefits of a Real Time Operating System(RTOS)?
A Real-Time Operating System (RTOS) is specifically designed for applications that demand precise timing and deterministic behavior, ensuring tasks are completed within strict deadlines.
Key benefits of using an RTOS include:
- Predictability and Determinism
- RTOS guarantees that tasks execute within specified time constraints, providing consistent and predictable behavior
- This is crucial for applications where the correctness of the system depends not only on the logical result but also on the timely execution of tasks
- High Performance and Responsiveness RTOS systems are fast and responsive, often executing actions within a small fraction of the time needed by general-purpose operating systems
- They are designed for minimal overhead, enabling faster context switching and efficient resource utilization, which leads to quicker responsiveness
- Task switching can occur in as little as 3 microseconds.
- Reliability and Stability RTOS are built for high reliability, minimizing the risk of system failures and crashes
- They are designed to be error-free, ensuring that faults are handled effectively and the system operates reliably even under error conditions
- This makes them suitable for mission-critical and safety-critical environments such as automotive control, medical devices, and aerospace systems.
- Efficient Resource Management An RTOS optimizes resource utilization by ensuring that high-priority tasks are completed first
- It efficiently manages resource allocation and deallocation, preventing conflicts among tasks and contributing to overall system stability
- This also translates to efficient memory usage, as RTOS typically have a small footprint compared to general OS counterparts, demanding far less instruction memory and RAM.
- Priority-Based Scheduling RTOS utilizes priority scheduling, ensuring that high-priority actions are executed before lower-priority ones
- This efficient task scheduling mechanism guarantees that critical tasks are executed in a timely manner, preventing delays.
- Reduced Downtime and High Availability RTOS ensures maximum system uptime by efficiently utilizing resources and keeping all devices in an active state, leading to minimal downtime
- As a result, RTOS systems are available 24/7, making them ideal for applications that require continuous operation.
- Enhanced Product Quality and Safety By providing deterministic behavior and robust fault tolerance, RTOS contributes to enhanced product quality, making products safer and more secure, particularly in critical systems where failure can have catastrophic consequences.
- Scalability RTOS are designed to be scalable, capable of managing both simple and complex systems. This allows applications to be expanded or integrated with additional resources without compromising real-time performance.
- Modularity and Code Reusability Many RTOS platforms feature a mandatory core kernel with customizable middleware and protocol stacks, allowing developers to build only what is needed
- This modularity enables the build-up of a code base that can be reused across different devices, making development and deployment more efficient and scalable.
- Cross-Platform Support Many RTOS can run on various microcontroller (MCU) platforms, simplifying the porting of applications from one platform to another.